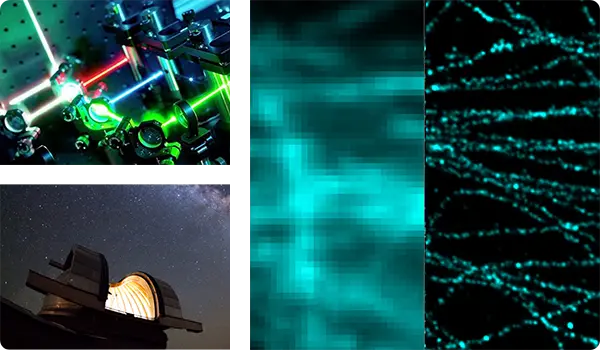
Research
sCMOS technology delivers high QE, low noise and in formats up to 61.4mm x 61.4mm.
Fluorescence Microscopy
Biophysics
Physics ( Soft Xray and EUV )
Astronomy
Instrumentation (OEM)
High performance CMOS and sCMOS devices designed for integration and operation into small spaces
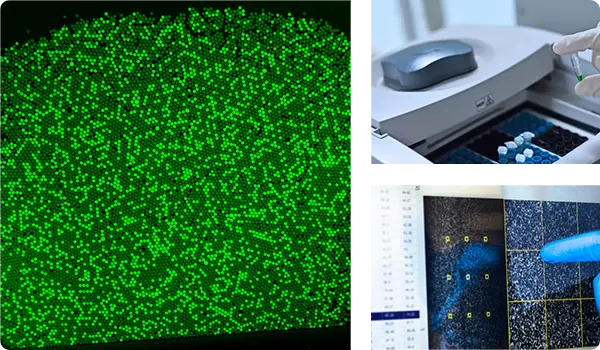
Industrial Inspection
Solutions for integration of advanced imaging technologies for challenging inspections.
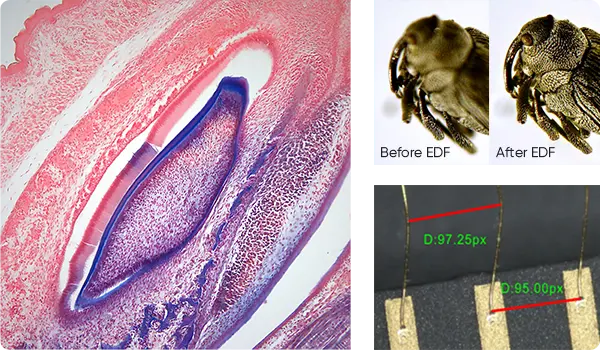
Microscopy
HDMI and CMOS Camera technology combined with capture and control software for stitching, focus enhancement, annotation and measurement